Intel® computer vision SDK (Opencv, Opencx and more)
Intel computer vision SDK the results of itseez acquisition The Intel defined the future usage of processing power by many acquisitions ...
Intel computer vision SDK the results of itseez acquisition The Intel defined the future usage of processing power by many acquisitions ...

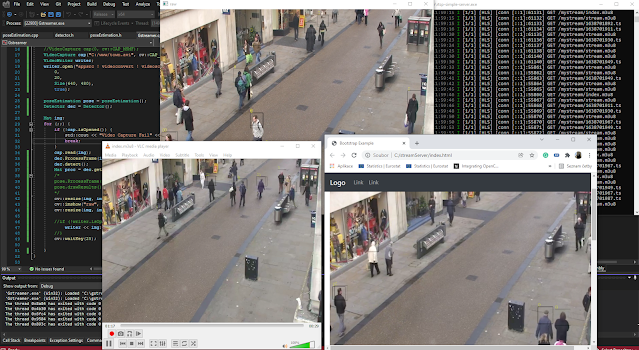
How to run and build an application based on Opencv in a Docker container is the purpose of this tutorial. The process described below is ...
Some my notes about new releases. Based on changelog and released notes. Deep neural network module is now accelerated with improved p...

Machine learning by Andrew Ng I would like to summarize couple of thoughts about this famous coursera course. I just guess what you ...

Microsoft and cognitive service computer vision is one of the most visible on build 2017 Looks pretty cool, Microsoft machine learning ...

Future of Machine learning in 2017 from the dark side Machine intelligence is our future. It is almost everywhere in some form right ove...
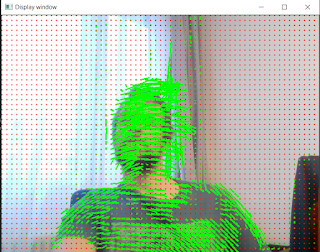
Opencv target tracking example The computer vision is just super fun. Machine learning with just visible results.. This is so powe...

Easy install and build of Opencv 3+ tested on 3.2 version with contributor library and additional features described step by step, picture...
Simple installation of OpenCV for Visual Studio 2017 by image example. Easy and fast way to start coding in OpenCV by Nuget packages. If yo...

Helping on stackoverflow Maybe some of this ideas are useful also for you. Question was?? You have one people income stream and you...
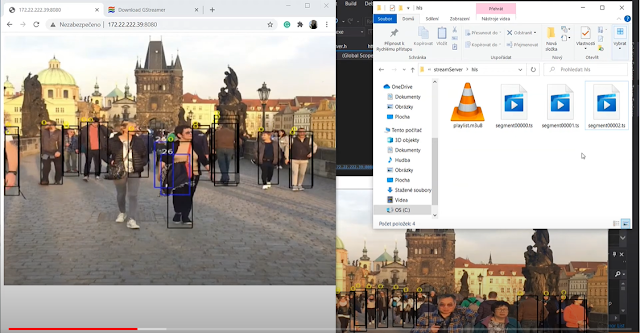
Support vector machine with Histogram of oriented gradient trained near online, and tracker. Building the SVM detector based on ...

Research results in vibration control, Time delay systems and control theory How force to follow through the Ph.D. thesis. This is...